N1K0 - Micromouse Project
Overview
| Role: | As the lead mechanical engineer for the N1K0 Micromouse project, I was responsible for the complete mechanical design, optimization, and final assembly. My primary focus was on developing a high-performance drive system and ensuring structural integrity for high-speed maze navigation. |
| Outcome: | Successfully designed and manufactured a compact, robust micromouse chassis featuring a custom 2-stage gear reduction system. The mechanical system provided the necessary torque and speed for competitive performance, demonstrating proficiency in precision engineering and assembly. |
| Skills Applied: | SolidWorksMechanical DesignGear System DesignManufacturingPrecision AssemblyPrototyping |
Mechanical Systems & Design
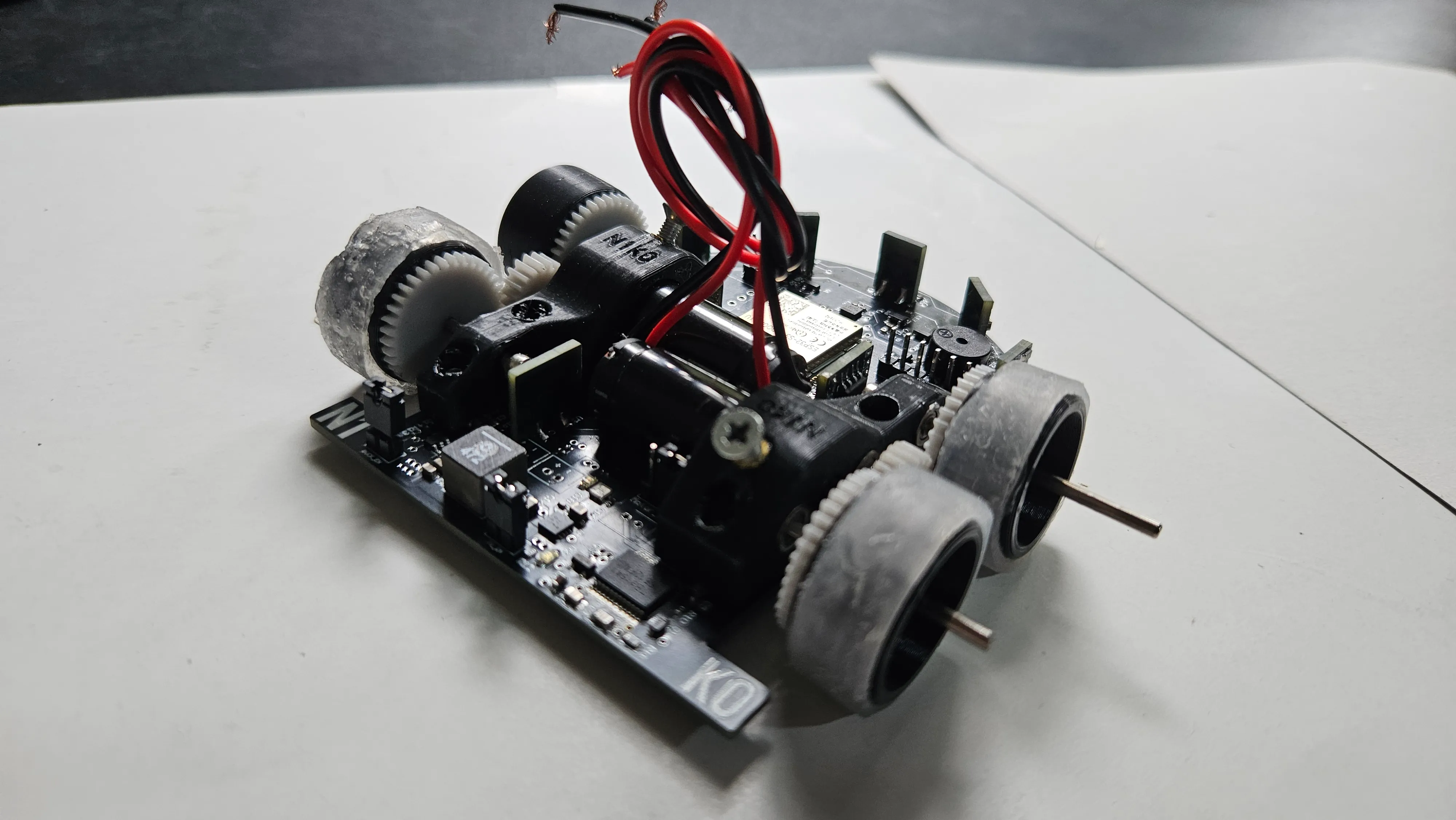
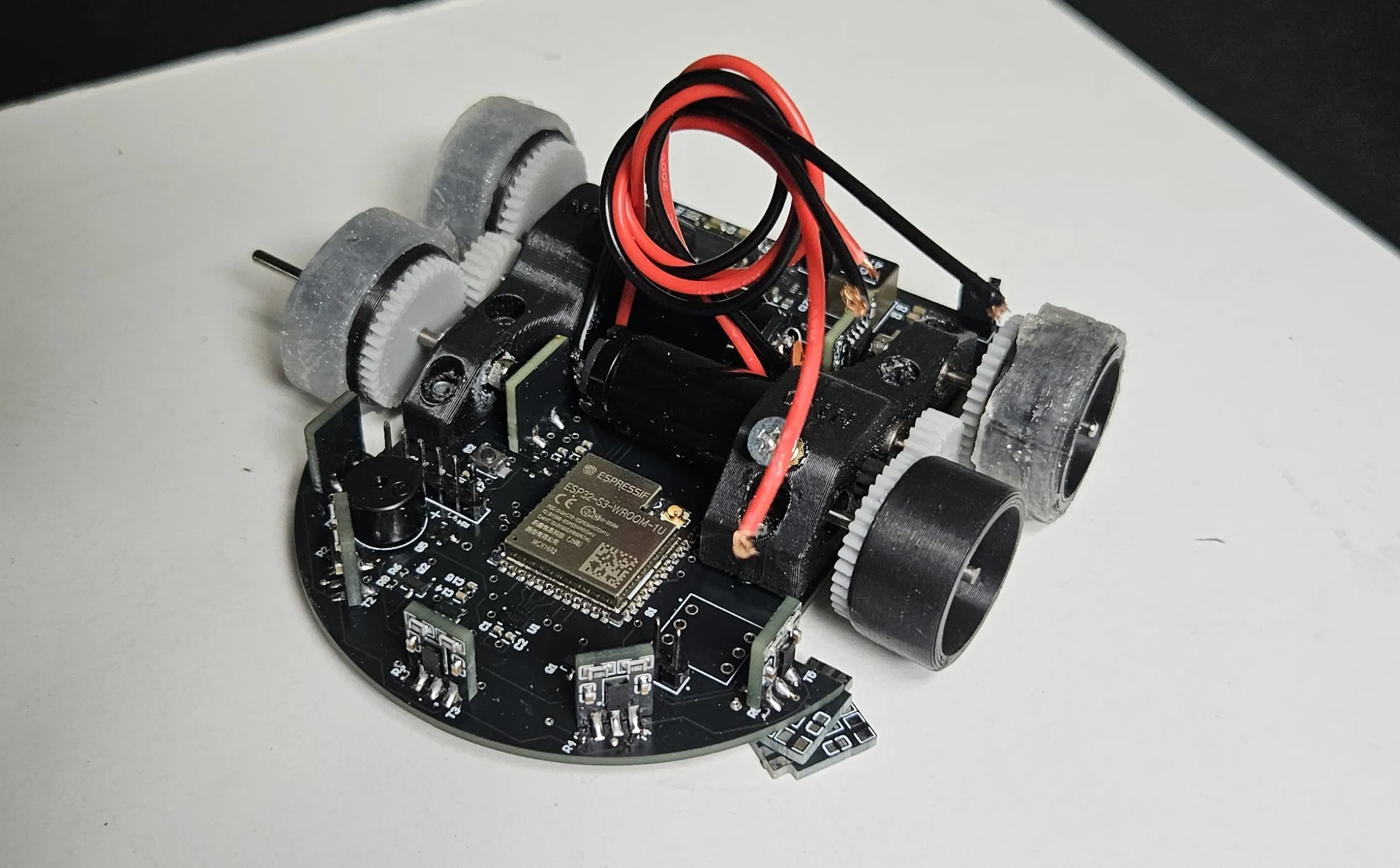
- 2-Stage Gear Reduction System
- Engineered a custom 1:6 reduction ratio 2-stage gear system to optimize torque delivery from the motors to the wheels.
- Calculated gear teeth profiles and tolerances to minimize backlash and ensure smooth power transmission at high speeds.
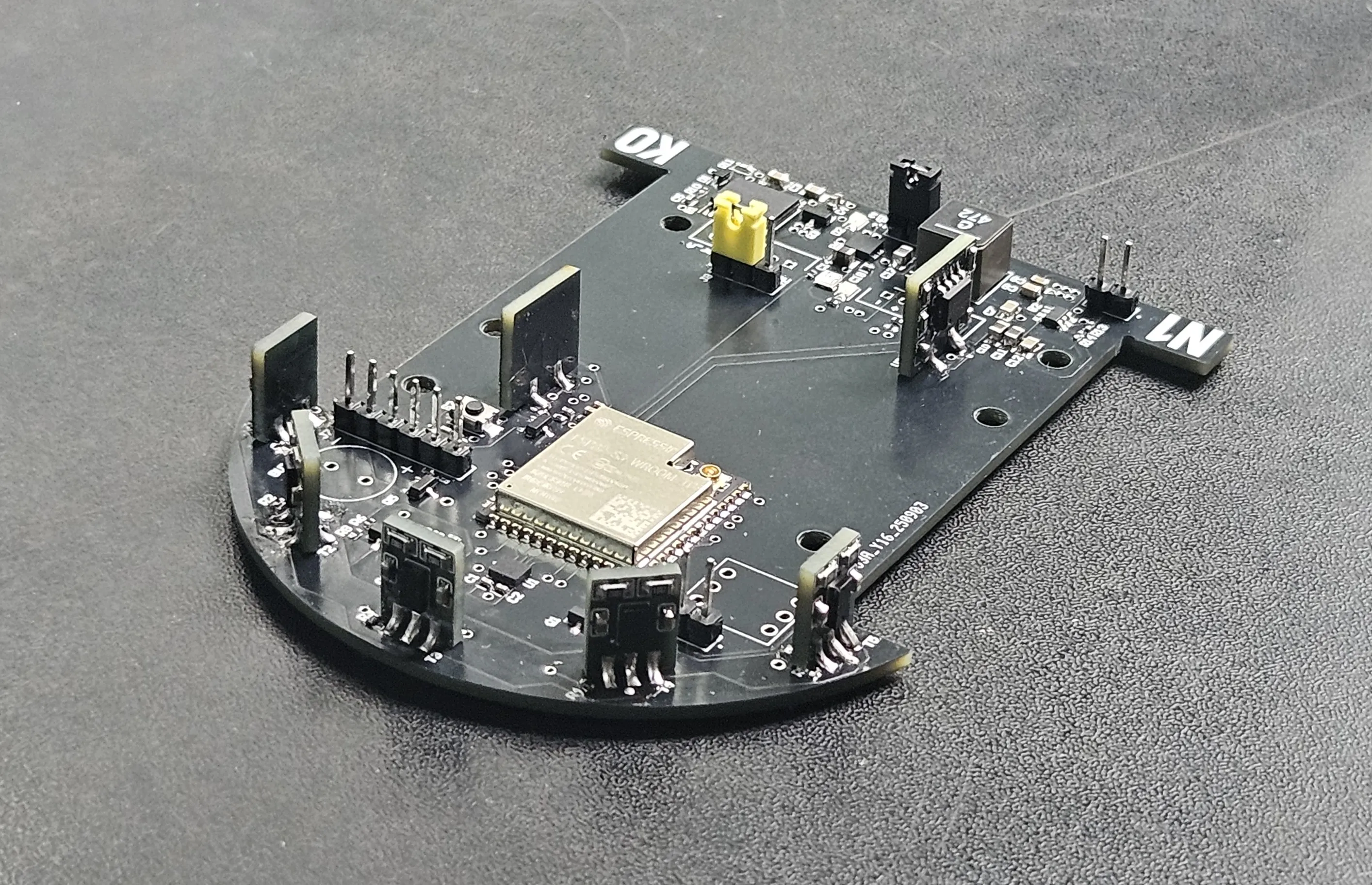
- Chassis Design & Optimization
- Used SolidWorks to model the entire mechanical assembly, focusing on weight distribution and center of gravity to improve stability during rapid turns.
- Designed mounting points for sensors, PCB, and motors, ensuring a compact and accessible layout.
- Manufacturing & Assembly
- Managed the manufacturing process of custom parts, utilizing precision machining and 3D printing where appropriate.
- Handled the final assembly of the whole micromouse, ensuring all mechanical and electrical components were perfectly integrated.
Conclusion
The N1K0 project was a significant challenge that allowed me to apply theoretical mechanical engineering principles to a high-speed robotics application. Designing the 2-stage gear system was a highlight, requiring precise calculations and iterative prototyping to achieve the desired 1:6 reduction ratio. This project not only sharpened my skills in SolidWorks and mechanical design but also gave me valuable experience in the practical aspects of manufacturing and assembly. The resulting micromouse was a testament to the importance of a well-engineered mechanical foundation in robotics.
Gallery